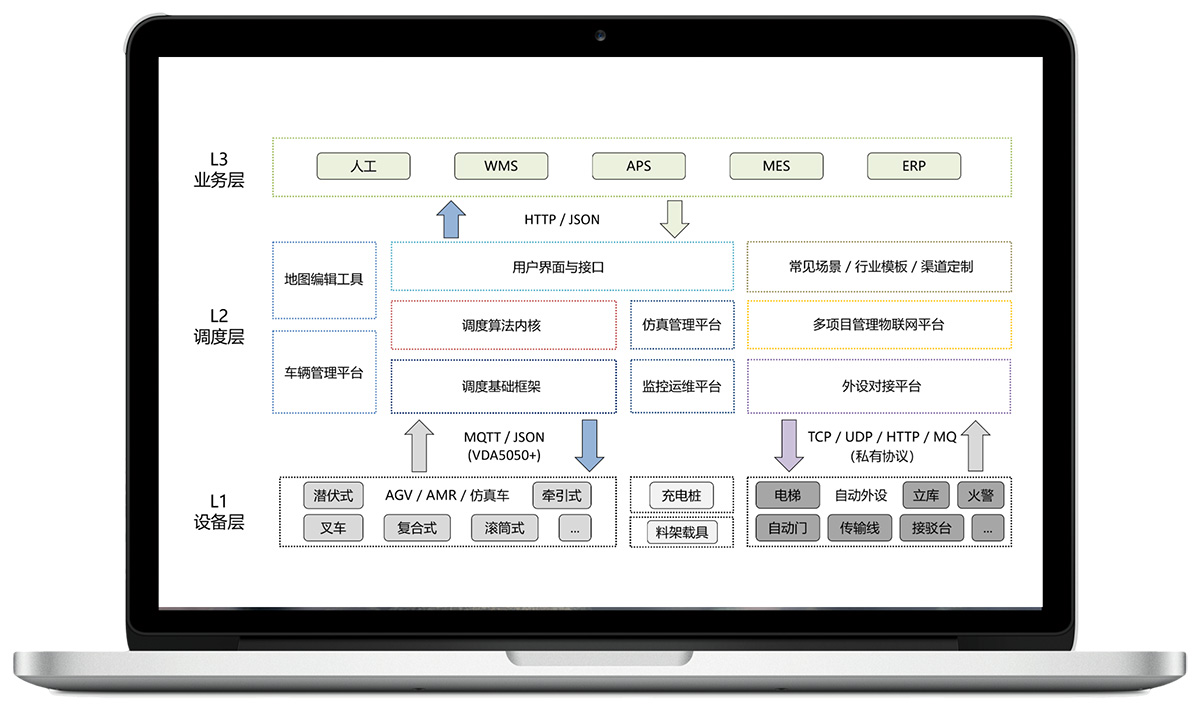
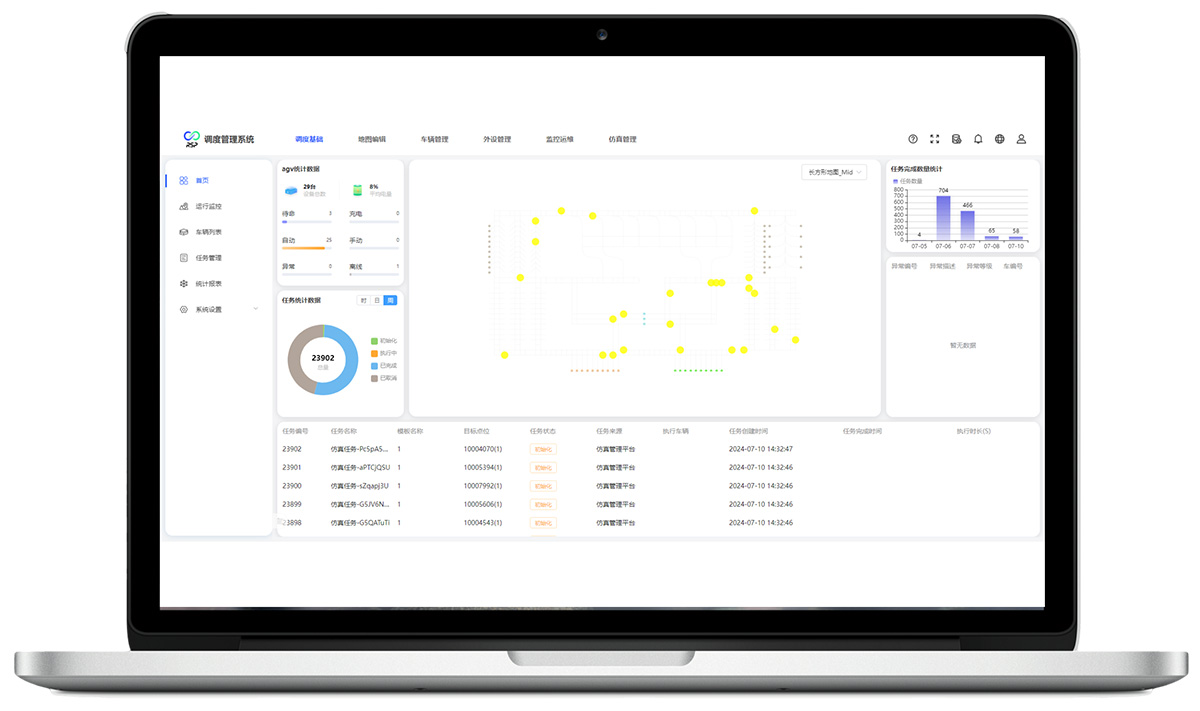
The Robot Scheduling Platform (RSP) focuses on the efficient scheduling and management of automated equipment and robots. Utilizing advanced algorithms, it optimizes task allocation, path planning, and collaborative operations to enhance the efficiency and accuracy of factory and warehouse operations. The system features a user-friendly and intuitive interface, allowing operators to easily monitor AGVs/AMRs, equipment, tasks, and processes. RSP natively supports the international standard protocol VDA5050, enabling the integration of third-party AGV/AMR and supporting multi-brand and multi-model mixed scheduling.
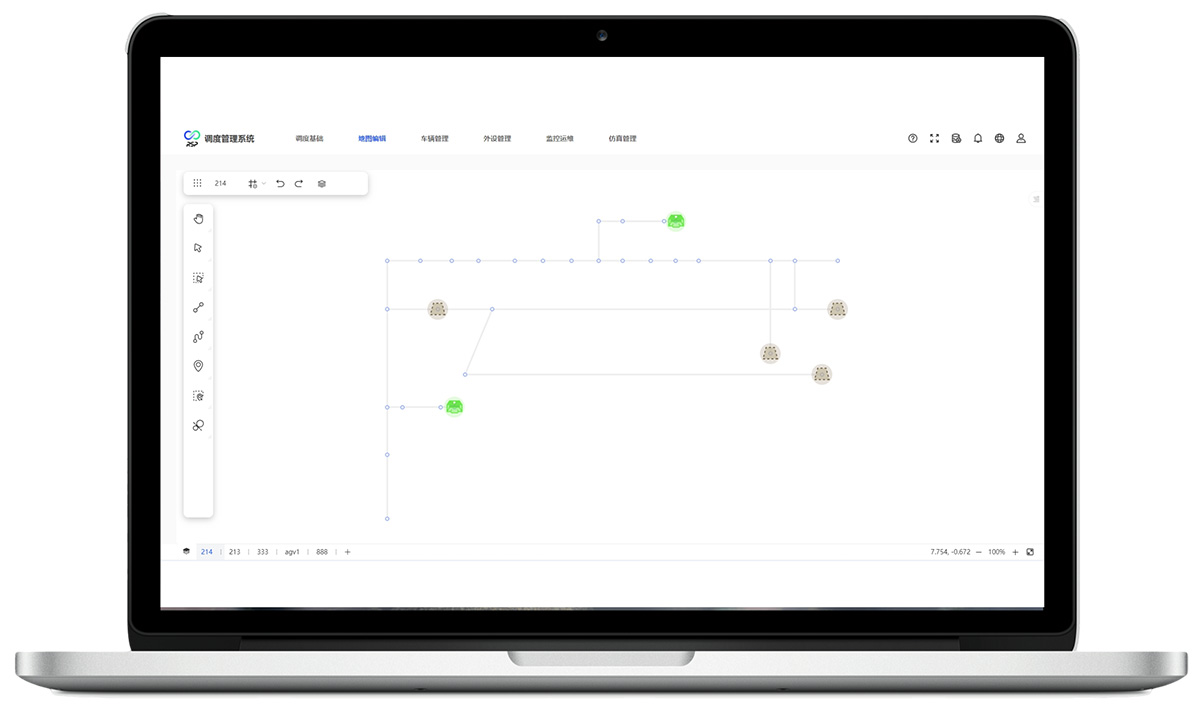
The Map Editing Tool is specifically designed for the Robot Scheduling Platform (RSP) to optimize the AGV/AMR navigation and task execution of AGVs/AMRs in industrial environments. This tool is developed with a focus on providing users with a robust and flexible platform, allowing precise creation, editing, and management of AGV/AMR operational maps based on actual production layouts and operational needs.
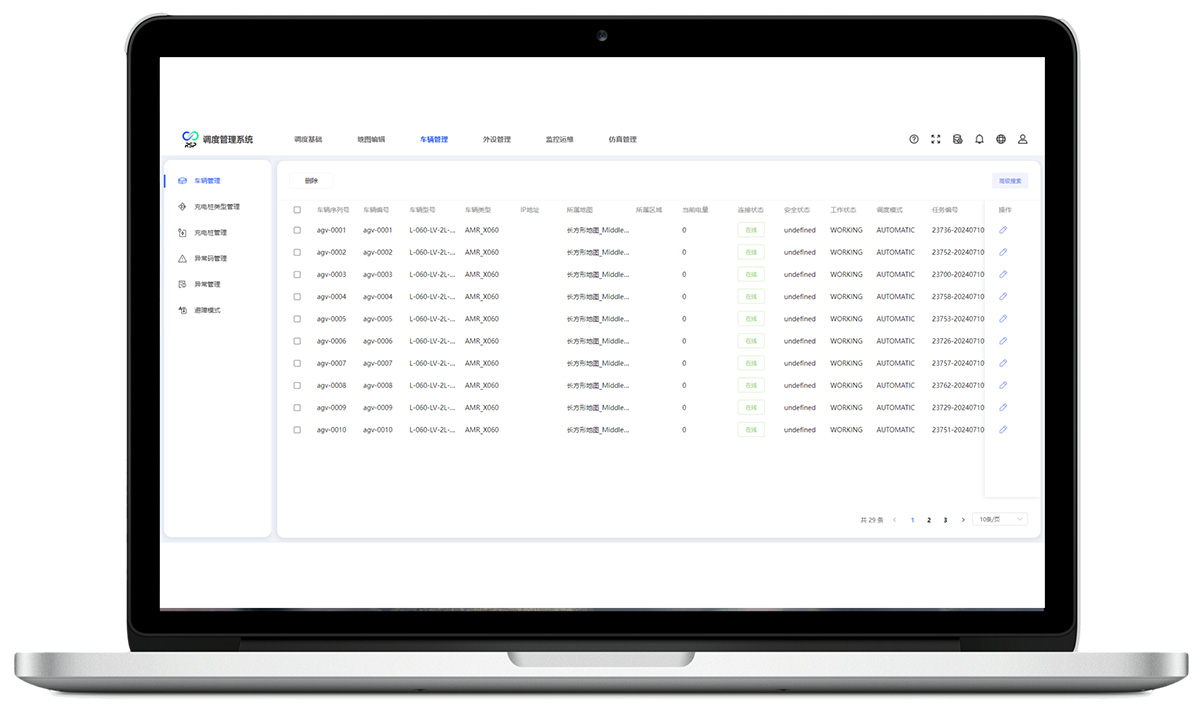
The Vehicle Management Sub-Platform is a comprehensive solution dedicated to providing real-time status monitoring, efficient exception handling, flexible configuration management, an intuitive manual control interface, seamless program updates, and intelligent charging station management. It optimizes the operational management of AGV/AMR and other vehicles.
The Scheduling Algorithm Core is the central component of the Xiaowu Intelligent RSP system, specifically designed to optimize the driving paths and task assignments of AGV/AMR in complex warehouse environments. It employs advanced path-planning algorithms, combined with detailed warehouse maps, shelf layouts, and real-time data analysis, to intelligently plan the shortest and most efficient routes for AGV/AMR groups. By considering the current status of AGVs/AMRs, the flow of goods within the warehouse, and potential congestion points, this core not only achieves efficient path planning for individual AGVs/AMRs but also optimizes coordination among multiple AGVs/AMRs.
The Scheduling Core Framework is a fundamental component of the RSP, responsible for translating high-level scheduling logic into specific vehicle execution operations. Through intelligent task decomposition, distribution, and management strategies, it enables rapid identification of task types, precise evaluation of priorities, and real-time monitoring of AGV/AMR status. This ensures that the subprogram's strategies and decisions are accurately understood and executed by the vehicles.
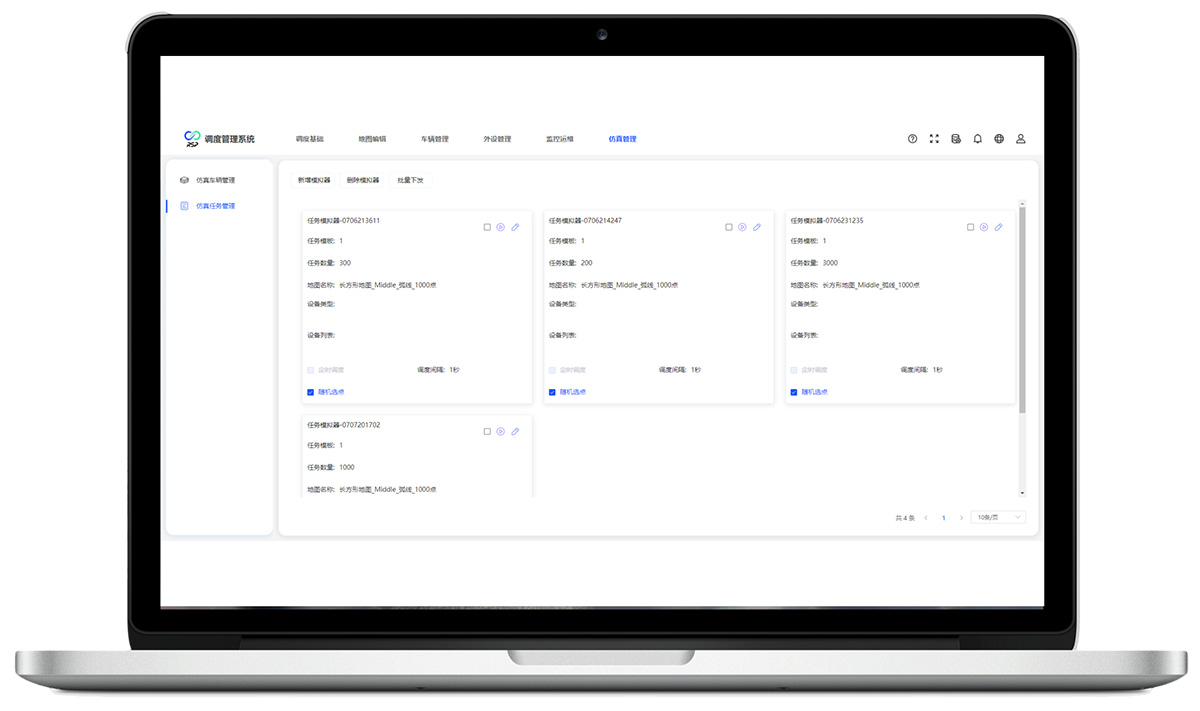
The Simulation Management Sub-Platform provides users with a powerful virtual environment for simulating, analyzing, and optimizing various operational processes. It allows engineers and system designers to conduct comprehensive analysis and adjustments of factory and warehouse layouts, business processes, and RSP configurations before actual production deployment, exploring potential improvements in different strategies and configurations.
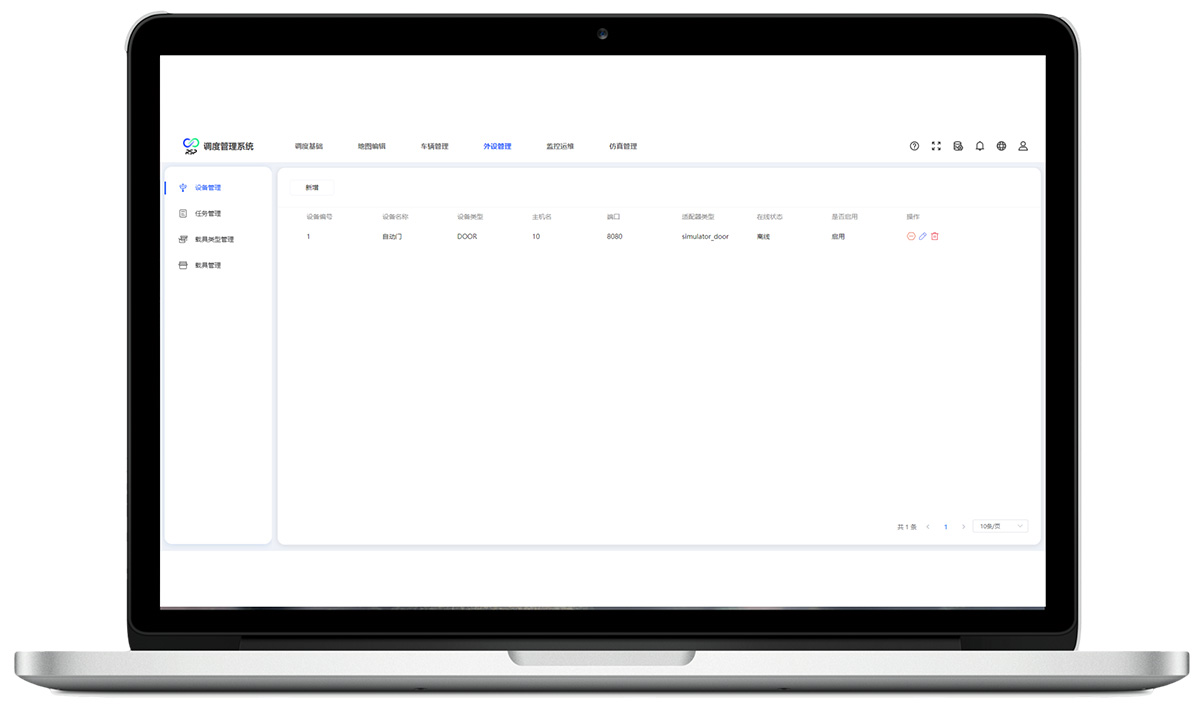
The Peripheral Integration Sub-Platform is designed for seamless integration, real-time monitoring, and intelligent scheduling of automated equipment, supporting various industrial communication protocols. Through a centralized management interface, this platform not only enables real-time monitoring of equipment operational status, parameters, and fault information but also allows flexible configuration of equipment parameters based on actual needs, facilitating timely online or offline operations to effectively address diverse production scenarios.
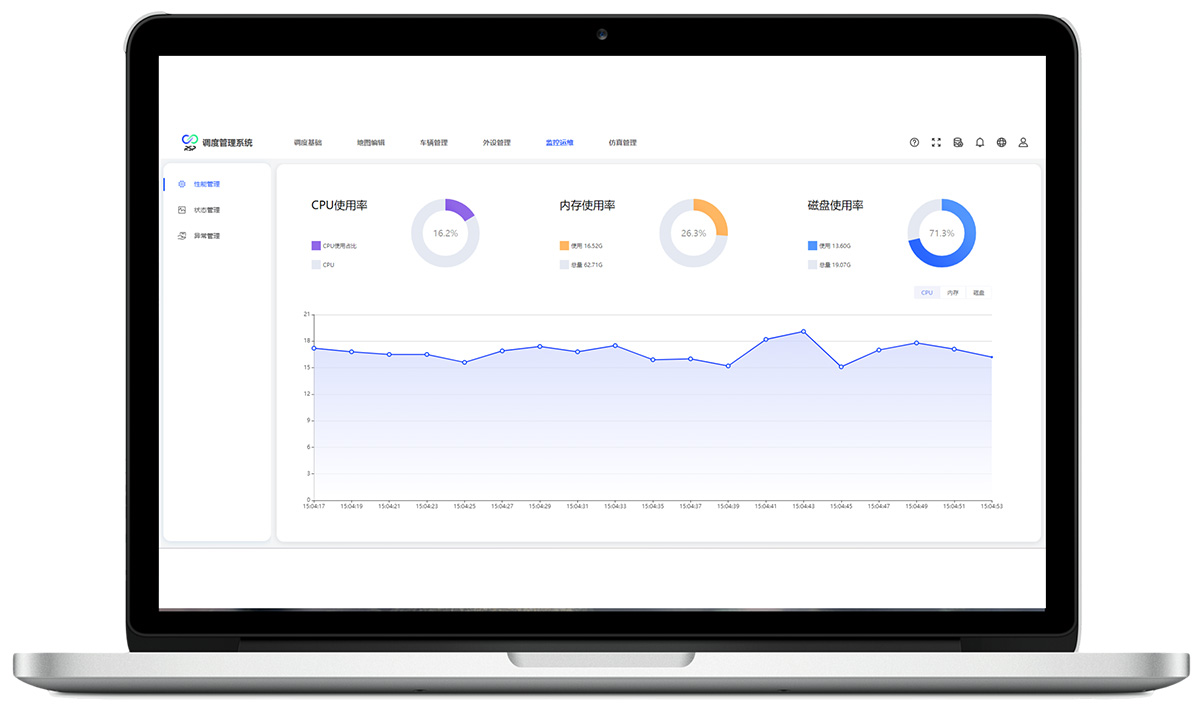
The Monitoring and O&M Sub-Platform is used for real-time monitoring and management of robots and automated equipment. Through its graphical user interface (GUI), it provides an intuitive and user-friendly operational environment, allowing users to easily monitor and manage the real-time status of robots and other automated equipment, including but not limited to operational status, battery levels, and maintenance requirements